GB01系列线对板连接器:在机器人关节模组中的应用与设计考量
在人形机器人向高自由度与高动态响应发展的过程中,关节模组通常需要在有限空间内集成驱动单元、减速机构、编码器以及控制电路等多个功能模块。电气连接不仅承担电源与信号传输,还会对系统的稳定性与控制精度产生间接影响。
(GB01系列线对板连接器在关节模组中的应用示意)
在此类高集成度结构中,连接器需在空间约束、动态运动以及多信号并行传输的条件下,实现稳定的电气连接与可靠的机械保持。
典型关节模组由电机、减速机构、编码器及驱动控制单元构成,属于机电高度耦合系统。内部连接点的接触状态、阻抗特性及抗振性能,会影响信号完整性,并进一步作用于系统闭环控制表现。
关节模组中的连接器设计要求
在人形机器人关节应用中,连接器通常需要在以下工程约束下实现可靠运行:
1. 多通道布线与电气隔离
关节内部同时承载电源、控制信号及编码器信号。多通道并行布线可能引入串扰或耦合问题,需要通过端子布局与结构设计进行控制;
2. 持续振动环境下的接触稳定性
关节在运行过程中存在周期性微振动,对接触界面的稳定性提出要求,以降低瞬态接触不良对信号连续性的影响;
3. 运动过程中的线束应力管理
关节运动会导致线束反复弯折,连接器端接区域需要具备一定的应力缓冲能力,以降低长期机械疲劳带来的可靠性风险;
4. 模块化装配与维护需求
在紧凑结构中,连接器需兼顾装配空间、锁止可靠性以及后期维护的可操作性。
GB01系列线对板连接器的结构特性
针对关节模组的应用特点,Greenconn GB01系列线对板连接器在结构设计与接触方案上进行了优化,以适配多通道、小空间及动态工况下的连接需求。
l 多点接触结构
通过多接触点设计,提高接触冗余度与稳定性,降低振动环境下的接触波动风险;
l 低接触阻抗(≤30 mΩ)
通过接触结构与材料匹配控制接触电阻,降低电源路径压降,同时提升信号传输稳定性;
l 紧凑型布局(1.25 mm间距)
在有限空间内实现多通道集成,支持关节模组内部电源与信号的混合布线需求;
l 抗振结构与锁止设计
通过结构设计增强连接保持力,降低振动或冲击条件下的意外松脱风险;
l 定制化支持能力
支持PIN定义、线束配置及结构适配等定制开发,以匹配不同关节结构的集成需求。
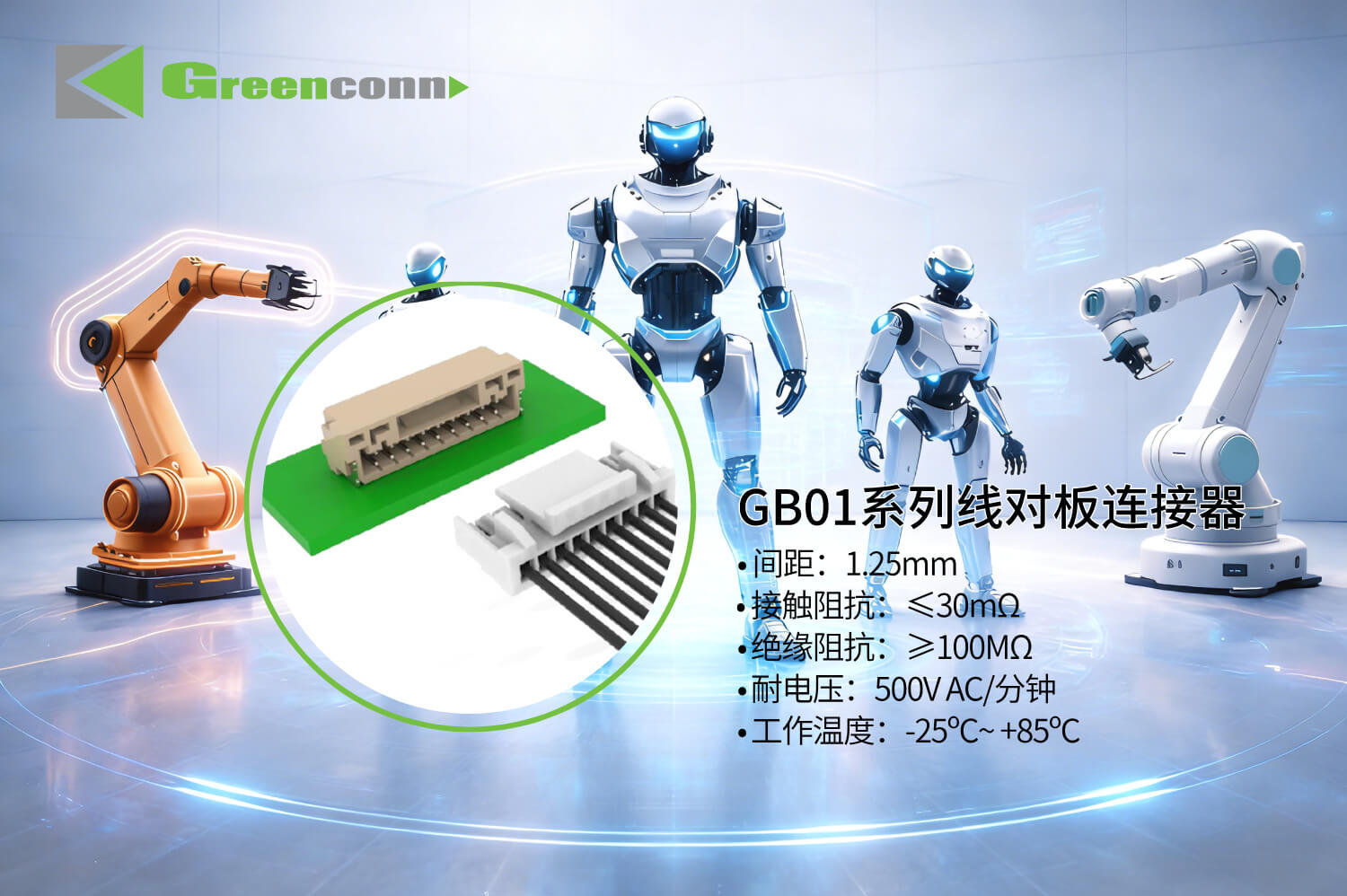
(GB01系列线对板连接器结构与对接示意)
随着人形机器人向高动态与长周期运行方向发展,关节模组对连接器在空间利用、接触稳定性及信号完整性方面提出更高要求。连接设计也将持续向紧凑化、多通道集成及面向动态工况的可靠性方向演进,以适配更复杂的系统集成需求。

