连接器:构建机器人“神经感知”与“动力传输”的关键支撑
在机器人系统中,算法与软件决定系统的“决策能力”,而硬件连接则直接影响其“执行质量”。 作为贯穿整机的关键互连单元,连接器承担着数据传输、信号控制与动力供给等核心任务,其性能直接关系到机器人运行的稳定性、响应精度与系统可靠性。
(连接器:机器人感知与执行的工程基础)
一、不同机器人类型中的连接应用特点
随着机器人系统集成度不断提升,不同类型机器人对连接器在可靠性、装配适应性及电气性能方面提出了差异化要求。
· 工业机器人
长期运行于高负载工况,连接系统需具备稳定供电能力、良好的抗振动性能及抗电磁干扰能力,以保障多轴联动控制的可靠性;
· 仿生机器人
结构紧凑、自由度高,连接需求集中在关节驱动与传感模块,对小型化、高密度互连及高速信号传输能力要求更高;
· 服务机器人
面向人机交互与智能感知场景,内部集成多种传感与通信模块,连接系统需在有限空间内兼顾稳定性与使用安全性;
· 协作机器人
强调灵活部署与人机协同,连接器需支持快速装配与维护,并在频繁运动条件下保持长期稳定;
· 自主移动机器人(AMR / AGV)
在持续运动与振动环境中运行,对电源与控制信号传输的连续性与可靠性提出更高要求。
二、机器人关键结构中的连接需求
从系统结构来看,机器人内部的连接需求主要集中在关节模组、控制系统以及移动执行单元等关键区域。其他如传感单元、末端执行器及内部布线系统,通常作为上述结构的组成部分或扩展模块进行集成。

(机器人关键结构与连接需求)
不同结构在空间约束、运动形式、信号类型及环境条件方面存在明显差异,其对连接系统的核心要求并不在于具体连接器“品类”,而在于连接能力是否能够匹配实际工程工况。
1. 关节模组:高频运动下的稳定连接
关节模组是机器人中运动最频繁、结构最紧凑的区域,连接系统需具备一定装配容差能力,在有限空间内实现电源与信号的可靠传输,并在持续运动条件下保持稳定接触。
2. 控制系统:信号完整性与系统扩展
控制柜与控制板系统承担着信号处理与逻辑控制功能,连接系统需保障板级互连的稳定性、敏感信号的完整性,以及对工业通信接口与系统扩展的支持能力。
3. 移动执行单元:复杂工况下的可靠连接
在移动底盘及驱动单元中,连接系统需长期应对振动与移动工况,重点关注电源与控制线路的稳固接入、连接连续性及必要的环境适应能力。
三、Greenconn 在机器人连接方案中的工程支持能力
围绕机器人系统在关节运动、控制处理与移动执行等关键结构中的连接需求,Greenconn 可提供多种成熟的连接解决方案,用于支持不同系统架构下的工程设计。
其连接方案可应用于板间互连、电源与信号混合传输、高密度空间布局以及具备一定环境适应要求的应用场景,帮助机器人系统在装配一致性、长期运行稳定性及系统集成方面实现可靠连接。
实际连接方案仍需结合机器人类型、运行工况及系统架构进行综合评估,相关连接形式与技术路径亦可根据具体应用需求进行灵活调整。
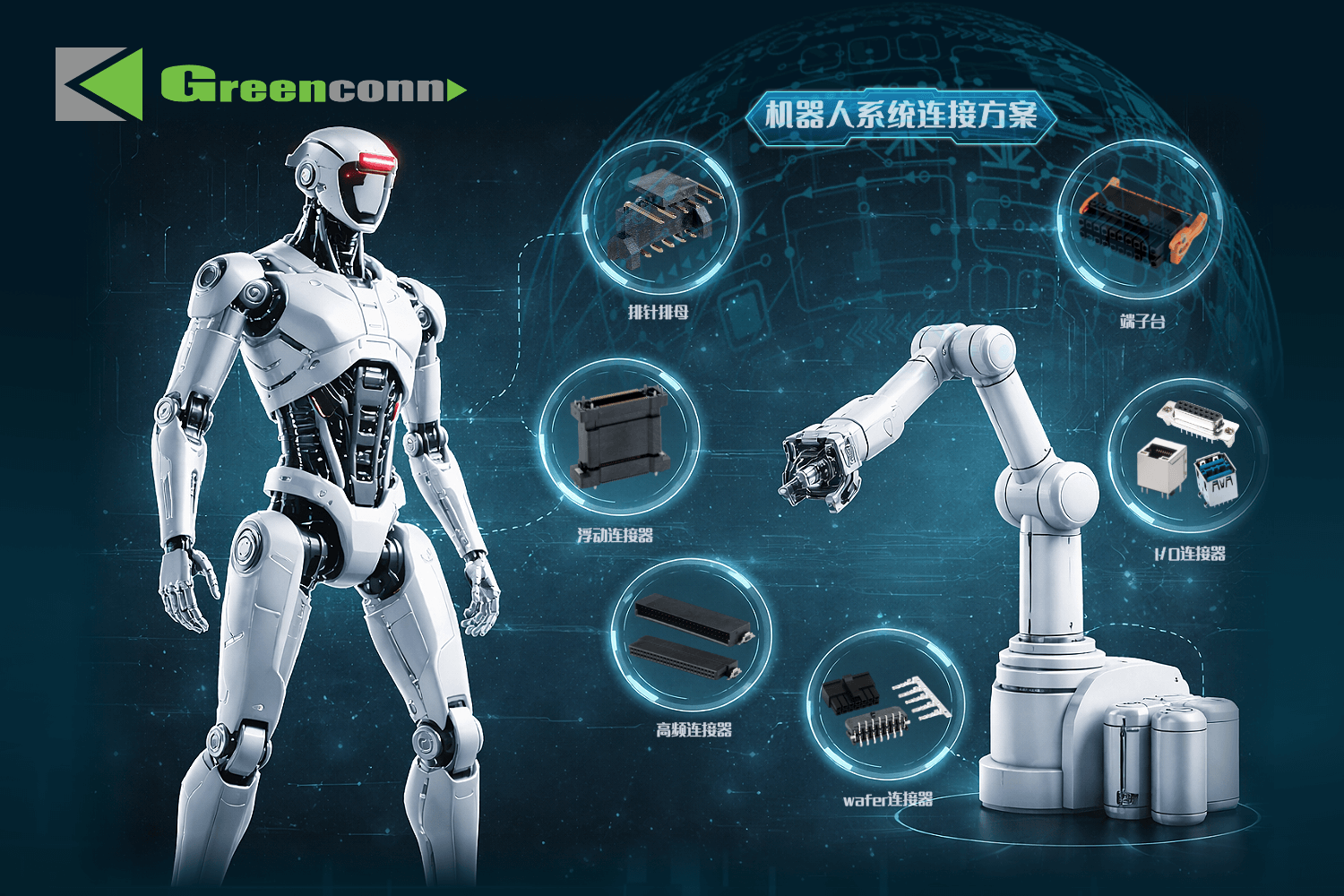
(Greenconn 机器人系统连接方案)
四、机器人连接器需求发展趋势
伴随机器人系统向更高性能、更高集成度发展,连接器的工程需求也在持续演进:
· 稳定性与低延迟并重
满足实时控制场景下的可靠信号传输需求;
· 高速数据与大电流并行
支持动力与信号的一体化连接;
· 高密度与小型化设计
适应关节及内部空间受限的结构布局;
· 系统级可靠性提升
在提升系统协同效率的同时,降低装配与运维复杂度。
面向机器人产业持续升级的趋势,Greenconn 将持续围绕工程可靠性,优化高速、高电流及高密度连接解决方案,为机器人系统提供稳定、高效的连接基础。

